Product Description
The NB Cluster Commander is a circuit used to translate the GM CAN bus data stream (commonly referred to as GMLAN) to the analog signals that drive the NB Miata instrument cluster.
The interface connected to the GM side only listens, meaning that you can perform ECM reflashes via HP Tuners or EFI Live without needing to disconnect the Cluster Commander from the network. Currently E39 (2012+), and E38 2010+ ECM's are supported. E38 (2006-2009), and E67 (crate) ECM's will be supported soon. A future feature of generic OBDII queries will open up running any canbus-based ECM to control a Miata cluster.
The Cluster Commander translates the Tachometer, Odometer, Speedometer, Oil, and Coolant gauges. The Check Engine light is connected directly to the MIL wire from the ECM.
Features
- Tachometer Correction - Tachometer can be fine tuned to be 99% accurate and scaled for aftermarket gauge faces with new redlines.
- Speedometer scaling - Additional speedometer corrections can be enabled on top of EFI Live / HP Tuners tire size wizards.
- Oil Pressure - Oil Pressure Table allows for X psi at Y rpm to trigger the oil pressure gauge. Linearization of the oil pressure gauge is unfortunately not possible.
- Coolant Gauge - Three modes possible - knee simulates OEM behavior (with a dead spot in the middle), Linear scales the gauge 1:1, and Hi/Med/Low turns the gauge into a simple 3-position gauge with user settable ranges.
- Check Engine Light - Can be wired directly to the Miata's instrument cluster from the MIL wire.
But I have a NA (90-97)...
Good news - The NA and NB clusters fit each others dashes, and the pins are the same - but different connector shells. The NA clusters runs off of a speedometer cable - and there are a number of products out there for speedo conversions available - but for simplicity sake I targeted the NB instrument cluster. If you need a cluster or connector shells, let me know - I have a few connections for used Miata parts. Wiring is a bit more complex, but I have instructions todo here:
Installation
Before installing make sure to read through the instructions thoroughly. Wiring is roughly as difficult as installing an aftermarket stereo - I made these installation instructions as verbose as possible, so don't be intimidated. If you have any questions or need any clarification, please contact me. I try and answer emails within 24 hours.
ECM Source
Three wires are needed from the ECM - the CAN bus pair and the Check Engine Light (MIL). The CAN bus can be sourced and extended from the OBDII plug if more convenient than running more wires from the engine bay.
E38
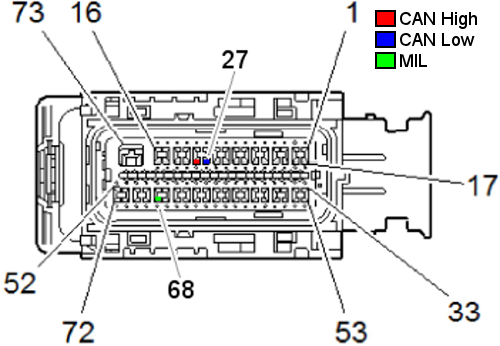
The E38 has two connectors on the ECM, Black and Gray. All three wires we're looking for are in the Black connector.
| Function | Position | Wire |
| CAN High | 28 | Tan/Black |
| CAN Low | 27 | Tan |
| MIL | 68 | Brown/White |
E39

The E39 has three connectors to the ECM - Blue, Black, and Gray. All three wires we're looking for are in the Blue connector.
| Function | Position | Wire |
| CAN High | 39 | Tan/Black |
| CAN Low | 40 | Tan |
| MIL | 46 | Brown/White |
OBDII Connector
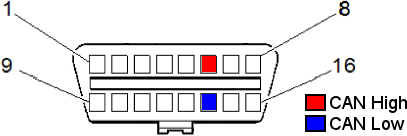
You can also extend the CAN bus wires from the GM OBDII connector - this orientation is looking at the connector face.
Wiring
Scotchlock vs. Crimp vs. Solder in automotive applications is a long debated topic. In my own experience I will say that I prefer a good crimp over a crappy solder, and shame upon anyone that strips and twists wires together with electrical tape. Since the wires in the OEM cluster are thin 22awg wires - I used to include 3M Scotchlock connectors, but now recommend stripping, twisting the wires together, and crimping them together with a single ended crimp connector. CAN bus is very resilient to noise and well suited in an automotive environment - while twisting the wire pair together does help with signal quality (especially inside a bulkhead connector, where crosstalk is at a prime) it isn't necessary for the shorter lengths we'll the patching into.

The power wires (red and black that connect to 1C and 3J) are tapped to provide power to the cluster commander. 1C is a keyed power source. The remainder are cut and spliced directly into the connector.
Software Setup
Cluster Commander does not require any additional setup to work - it's already populated with default values for that work well - and I try and set it up with the proper firmware values before the unit is shipped out. But for those that want ultimate control of their cluster I made everything adjustable. The defaults are set for the LFX - the only major difference in settings from the LFX and the LSx engine is the oil pressure requirements. LFX spec is 10psi at idle, 30psi at 2,000 RPM. LS3 spec is 6psi at 1,000 RPM, 18psi at 2,000 RPM, 24psi at 4,000 RPM. By default, the more stringent LFX oil spec is used to control the oil pressure gauge. Assuming your Speedometer and Odometer settings from your ECM are good, no further setup is required.
For the E38 ECM, there are two different GMLAN encoding methods. The later 2010+ E38 uses the same encoding scheme as the E39. 2006-2009 E38 uses a different scheme that can be switched to by the menus. When changing the ECM type, make sure you reload default values, or else the odometer will be wildly off. The 2006-2009 E38 only updates the speedometer and odometer once a second as opposed to the E39 that updates 10 times a second. Update speed can be changed with HPTuners and EFI live and is strongly suggested.
Connecting
Remove the two screws on the enclosure - this will expose the micro USB slot.
Serial Port Selection
The board uses the FTDI USB to Serial adapter for communication. This is a very common USB Serial converter that most operating systems have drivers built in for - but just in case, drivers can be installed from http://www.ftdichip.com/Drivers/VCP.htm. Once the driver is installed, the next step is to determine which COM port address has been assigned. In windows - go to Control Panel - Device Manager - expand "Ports - COM & LPT" - and take note of any port numbers listed.

In this example the COM Port is 4. If there are multiple ports listed, unplug the USB cable for 10 seconds and take note of which port disappears, then reconnect. As awkward as it sounds, this is the most reliable method.
Serial Terminal
Now that we know our COM port the next step is to install a Serial Terminal - if you're computer savvy, any serial terminal will do. PuTTY is free application that works extremely well. You can download it here. Once installed, open the application and select "Serial" - Change the Serial Line to the COM port noted above. Baud rate defaults to 9600.

Menus
Most of the menus are straightforward (and options may change as the firmware evolves). Each letter surrounded by a parentheses is a menu option. If you are connecting to the circuit while the cluster is connected and powered you can manipulate the instrument cluster with the first section. The second section relates to settings that will need to be saved with the "(W)rite to EEPROM" option. Display VIN and Display Registers are used for troubleshooting purposes.
Oil Pressure
The stock Miata oil pressure input is wired to a 10psi pressure switch. Whenever the pressure drops below 10psi, the gauge needle drops to the left peg. The stock gauges movement is affected by coolant temperature and RPM - which make for a very elaborate fabrication of a real mechanical oil pressure gauge. At the lower idle RPM's of the GM engines, it can be difficult to determine if the needle is off the peg - and for track use, lets be frank - nothing can replace a classic mechanical oil gauge.
Cluster Commander extends the functionality of the stock gauge by reading the oil pressure from the ECM and determining if the oil pressure is "good" depending on the RPM range. By default Cluster Commander uses the higher pressure LFX table.
Changed rear tire size? Changed differential ratio after setting up your ECM? Using this menu will help reset your speedometer to be accurate. On a long flat stretch with a good GPS, make note of what your GPS speed is and what your instrument cluster reports. Enter these values into the menu and a simple percentage adjustment will be applied across all incoming VSS speeds from the ECM.
Updating Firmware
All units ship with the most recent firmware available. Firmware Version is displayed on the first line of the main menu. Download the most recent firmware from http://openhoonage.com/firmware and extract the zip to a directory. With the board connected, double click on "RunMe". A window will pop up and display the current com ports - select the one for the Cluster Commander and hit enter.

After hitting enter the flash process will commence. If any errors occur during this process, let me know.
After completing it's generally a good idea to connect to the Cluster Commander via PuTTY and double check your saved settings. It may be necessary to (L)oad the default values and re-enter your changes.
Troubleshooting
There are really only three ways for the circuit to fail - it cannot read the GM ECM, it can't output to the cluster, or the circuit itself is not receiving power.
Status LED
The status LED is used to quickly verify communication between the ECM and the Cluster Commander without needing to hook up a computer. Communication from the instrument cluster to the Cluster Commander should be readily apparent - when powered, most of the error lamps will light up. With the cluster commander powered up the status LED with blink - this verifies that the cluster commander is receiving power. When the light turns solid it is receiving data from the GM ECM.
VIN
With the laptop hooked up and in setup mode, you can hit the "V" key and after a few seconds the ECM will returned the VIN. If the ECM times out, try to pull the VIN again and verify the ECM is receiving power (key on, engine off). If the ECM still doesn't reply, double check your CANH and CANL wires with a multimeter, using a paperclip in the Cluster Commanders harness to the ECM Harness.
Registers
If there doesn't appear to be any communication with the GM ECM, the next step is to read the registers from the CAN interface. If the registers do not match the information below, contact me for additional troubleshooting steps or an RMA.

Legalese
I understand how easily a simple engine swap project that was only supposed to take 3 months working weekends can expand to a year or longer. If you have any issue with your purchase, contact me and we'll try and get something sorted out.
Disclaimer
Openhoonage LLC make no representations or warranties of any type with respect to the contents in this manual. Openhoonage LLC disclaim any implied warranties or fitness for any particular purpose. Openhoonage LLC is not liable for any errors contained within or for incidental or consequential damages in connection with the supply, performance or use of the hardware and software or this manual. Openhoonage LLC reserve the right to revise this installation and user manual at any time, without obligation to notify any person of revisions.
Warranty
Openhoonage LLC make every effort to insure our products and services are of the highest quality and standards. It is our intention to maintain a mutually beneficial and cordial relationship with each and every customer. Openhoonage LLC warrants all merchandise manufactured by Openhoonage LLC against defects in workmanship or material for a period of two years after the data of purchase. This warranty applies to the first retail purchaser and covers only those products exposed to normal use or service. It does not apply to those products used for a purpose for which said products were not designed, or which has been altered in any way that would be detrimental to the performance or life of the product, or misapplication, misuse, negligence, or accident. Any part or product found to be defective after examination by Openhoonage LLC will be repaired or replaced. Openhoonage LLC assumes no responsibility for diagnosis, removal and/or installation labor, loss of vehicle use, loss of time, inconvenience or any other consequential expenses. This warranty is in lieu of any other expressed or implied warranties, including any implied warranty or merchantability or fitness, and any other obligation on the part of Openhoonage LLC or selling dealer.